Rancher 部署策略
本文提供了两种部署 Rancher 的策略,每种方法都有优缺点,请按照您的场景选择最适合的部署策略:
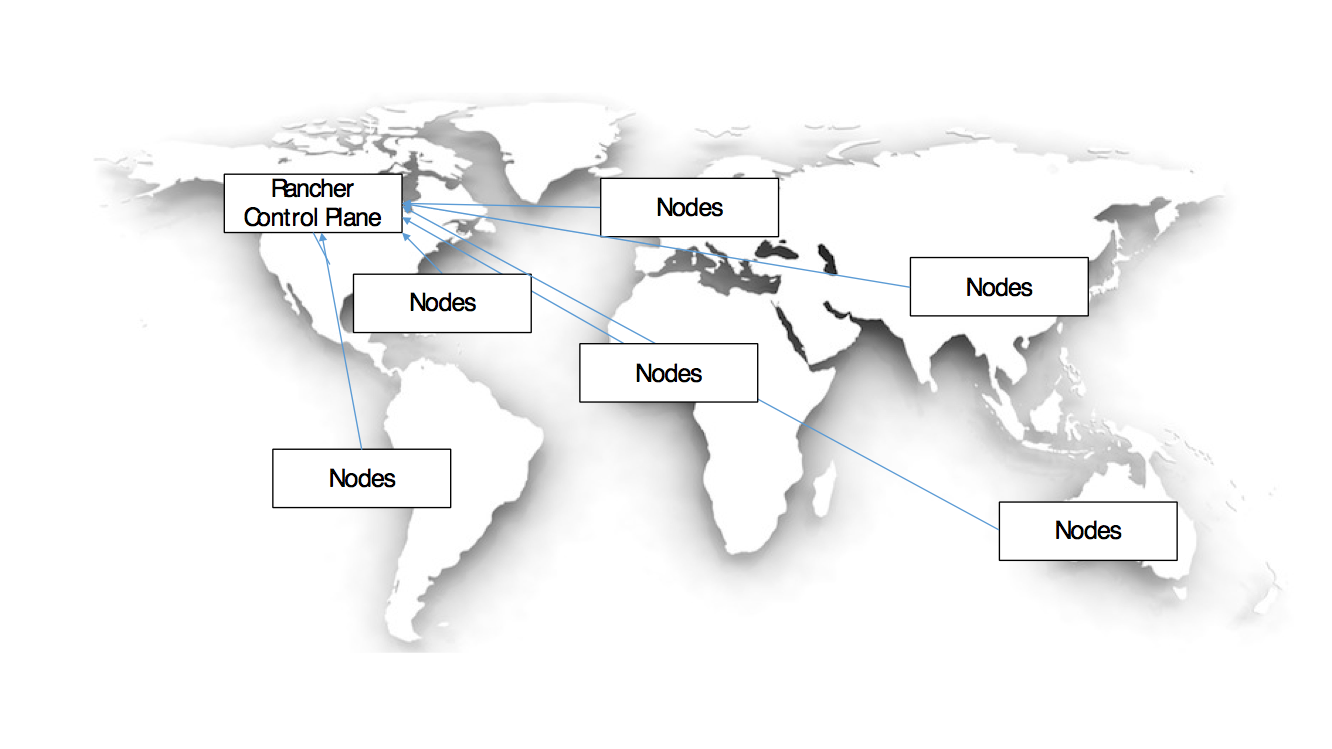
轴心方式拓扑#
在轴心部署场景中,由一个 Rancher control-plane 来管理遍布全球的 Kubernetes 集群。control-plane 在一个高可用的 Kubernetes 集群上运行,但这种部署策略会受到延迟的影响。
优点#
- 环境可以具有跨区域的节点和网络连接。
- 单一 control-plane 界面,查看所有区域和环境。
- Kubernetes 不需要 Rancher 操作,并且可以容忍失去与 Rancher control-plane 的连接。
缺点#
- 受制于网络延迟。
- 如果 control-plane 失效,在恢复之前全球范围内无法新建集群,但是每个 Kubernetes 集群可以继续单独管理。
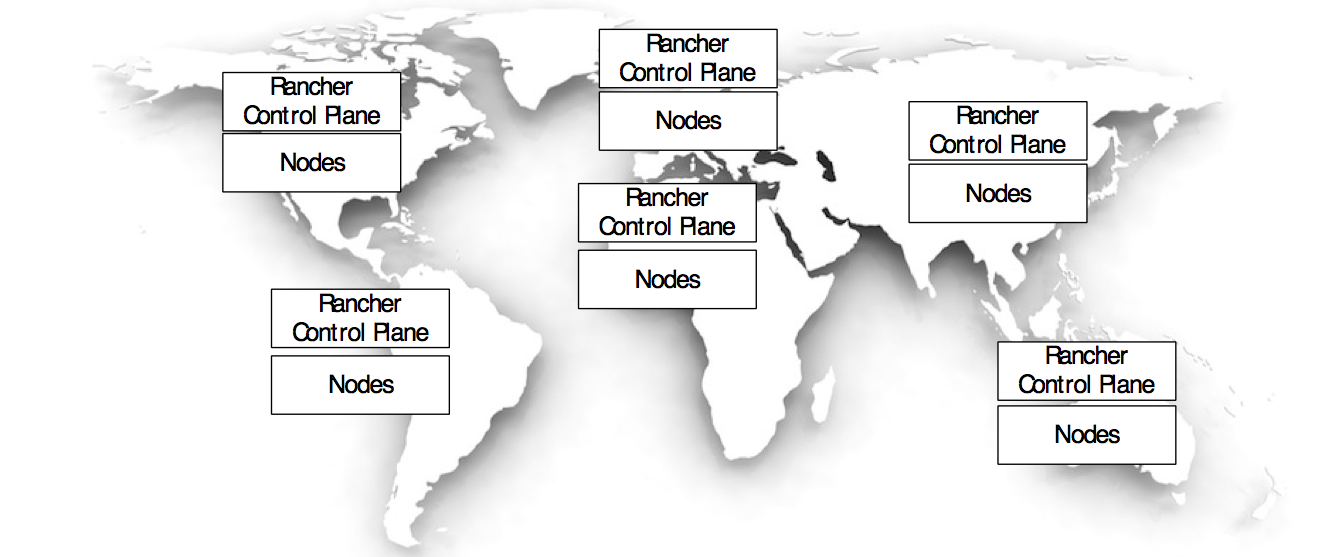
区域性拓扑#
在区域部署模中,多个 Rancher control-plane 被部署在靠近计算节点的地方,不会受到延迟的影响。
优点#
- 即使另一个区域的 control-plane 发生故障,本区域内的 Rancher 功能仍然可以保持运行状态。
- 网络延迟大大降低,提高 Rancher 的性能。
- Rancher control-plane 的升级可以在每个区域独立完成。
缺点#
- 管理多个 Rancher 安装的开销较大。
- 需要在多个界面中才能查看到全球所有的 Kubernetes 集群。
- 在 Rancher 中部署多集群应用时,需要在每个 Rancher Server 中重复这个过程。